With the rapid development of artificial intelligence and robotics, embodied intelligence is increasingly becoming an important direction driving human–machine interaction, smart manufacturing, digital twins, and ubiquitous computing. Embodied intelligence emphasizes not only algorithmic intelligence but also interaction capabilities and behavioral performance in physical space. Therefore, establishing a unified general information and behavior model for embodied intelligence is significant for achieving interoperability and collaborative applications across industries, platforms, and devices.
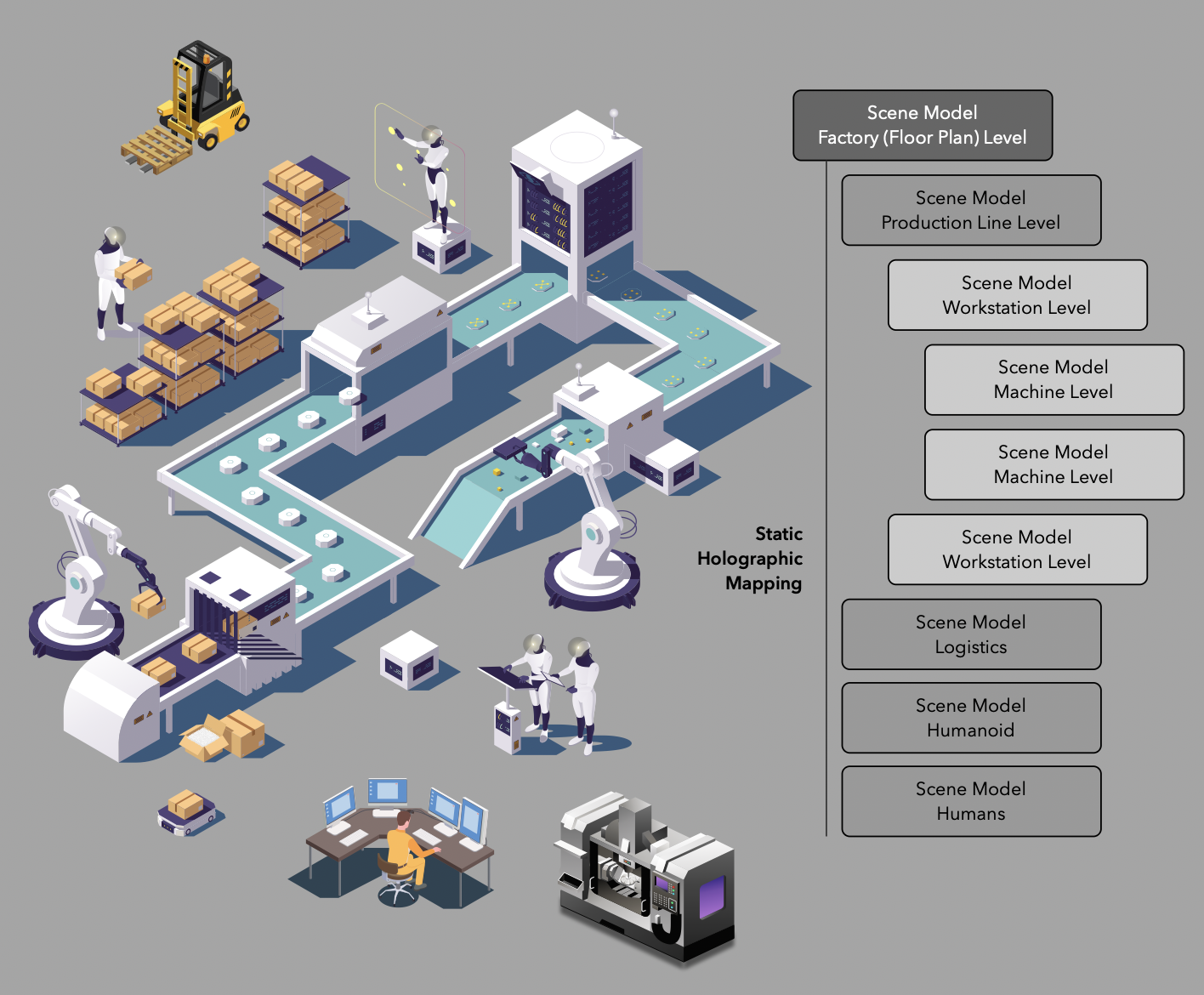
This standard proposes a unified architecture for information and behavior modeling of embodied intelligence, defining metamodels, information (static) models, behavior (dynamic) models, and their respective interoperability requirements. By describing metamodel types and structures and security models, it forms an extensible modeling foundation; by semantically expressing information models and data exchange, it supports the description and static modeling of humanoid robots and their industrial contexts; and by dynamically abstracting behavior models and virtual simulation, it supports comprehensive dynamic modeling and reasoning for robot behavior trees, state machines, semantic layers, and agents.
The standard introduces domain-specific languages, communication protocols, and application specifications for operating systems and runtimes tailored to embodied intelligence, supporting standard interoperability methods for various humanoid robots across different domain scenarios.
To achieve interoperability among multi-source heterogeneous systems, the standard proposes interoperability mapping and compatibility mechanisms and integrates industrial and IoT standards such as AAS (Asset Administration Shell), DPP (Digital Product Passport), OPC UA (OPC Unified Architecture), and MTP (Module Type Package), supporting alignment and cooperation with existing robot-related standards (e.g., IEEE 1872 series, ISO/TC 299, IEC 61508/IEC 60748).
This standard is intended to provide a unified generic information and behavior modeling approach for embodied intelligence applications, improving semantic consistency, behavior orchestrability, system interoperability, and application extensibility, and to provide fundamental support for the research and deployment of future humanoid robots, industrial and collaborative robots, agents, and digital twins.